

About Go2
Go2 Product List
| Model | AIR | PRO | X | EDU *Multiple configurations available, please contact Unitree for details |
|
|---|---|---|---|---|---|
| Rendering |  |
 |
 |
||
| Mechanical Parameters | Standing Dimensions | 70cmx31cmx40cm | 70cmx31cmx40cm | 70cmx31cmx40cm | 70cmx31cmx40cm |
| Lying Down Dimensions | 76cmx31cmx20cm | 76cmx31cmx20cm | 76cmx31cmx20cm | 76cmx31cmx20cm | |
| Weight with battery | Approximately 15kg | Approximately 15kg | Approximately 15kg | Approximately 15kg | |
| Material information | Aluminum alloy + High-strength engineering plastic |
Aluminum alloy + High-strength engineering plastic |
Aluminum alloy + High-strength engineering plastic |
Aluminum alloy + High-strength engineering plastic |
|
| Electrical Parameters | Power Supply Voltage | 28V~33.6V | 28V~33.6V | 28V~33.6V | 28V~33.6V |
| Maximum Operating Power | Approximately 3000W | Approximately 3000W | Approximately 3000W | Approximately 3000W | |
| Performance Parameters | Load | ≈7kg((Limit ~10kg) | ≈8kg (Limit ~10kg) | ≈8kg (Limit ~12kg) | ≈8kg (Limit ~12kg) |
| Movement Speed | 0-2.5m/s | 0-3.5m/s | 0-3.7m/s (Limit ~5m/s) |
0-3.7m/s (Limit ~5m/s) |
|
| Maximum Climbing Height | Approximately 15cm | Approximately 16cm | Approximately 16cm | Approximately 16cm | |
| Maximum climbing slope angle | 30° | 40° | 40° | 40° | |
| Basic computing power | / | 8-core high-performance CPU[4] | 8-core high-performance CPU | 8-core high-performance CPU | |
| Joint parameters | Maximum joint torque[1] | / | About 45N.m | About 45N.m | About 45N.m |
| Aluminum alloy precision joint motors | 12 | 12 | 12 | 12 | |
| Extremely large joint motion range | Body: -48° to 48° Thigh: -200° to 90° Calf: -156° to -48° |
Body: -48° to 48° Thigh: -200° to 90° Calf: -156° to -48° |
Body: -48° to 48° Thigh: -200° to 90° Calf: -156° to -48° |
Body: -48° to 48° Thigh: -200° to 90° Calf: -156° to -48° |
|
| Inner knee joint cable routing | Yes | Yes | Yes | Yes | |
| Joint heat pipe for auxiliary cooling | Yes | Yes | Yes | Yes | |
| Sensor Configuration | Ultra-wide-angle 3D LiDAR | Yes | Yes | Yes | Yes |
| Wireless vector positioning Companion module |
No | Yes | Yes | Yes | |
| High-definition wide-angle camera | Yes | Yes | Yes | Yes | |
| Foot force sensor | No | No | No | Yes | |
| Function list | Basic exercise, dance, etc. | Yes | Yes | Yes | Yes |
| Automatic retractable handle | No | Yes | No | No | |
| Smart OTA upgrade | Yes | Yes | Yes | Yes | |
| RTT 2.0 image transmission | Yes | Yes | Yes | Yes | |
| Graphical programming | Yes | Yes | Yes | Yes | |
| Front Light (3W) | Yes | Yes | Yes | Yes | |
| Wi-Fi 6 Dual-Band Wireless | Yes | Yes | Yes | Yes | |
| Bluetooth 5.2/4.2/2.1 | Yes | Yes | Yes | Yes | |
| 4G Module | No | Yes, CN/GB | Yes, CN/GB | Yes, CN/GB | |
| Voice function[5] | No | Yes | Yes | Yes | |
| ISS 2.0 Intelligent Companion | No | Yes | Yes | Yes | |
| Obstacle detection and avoidance | Yes | Yes | Yes | Yes | |
| Charging pile recharge | No | No | Support | Support | |
| Secondary development[6] | No | No | Basic support | Support | |
| Accessories | Handheld remote control | Optional | Optional | Yes | Yes |
| High computing power module | No | No | No | Optional NVIDIA Jetson Orin (40-100 Tops of Computing Power) |
|
| Depth Camera | No | No | No | Yes | |
| Smart Battery | Standard (8000mAh) x 1 |
Standard (8000mAh) x 1 |
Standard (8000mAh) x 1 |
Long-Life (15000mAh) x 1 |
|
| Battery Life | About 1-2h | About 1-2h | About 1-2h | About 2-4h | |
| Charger | Standard (33.6V 3.5A) | Standard (33.6V 3.5A) | Standard (33.6V 3.5A) | Fast Charge (33.6V 9A) | |
| Warranty Period[7] | Half a Year | 1 Year | 1 Year | 1 Year | |
[1] The maximum torque in the table refers to the maximum torque of the largest joint motor; the actual maximum torque varies for the 12 joint motors.
[2] In open environment without interference and blocking.
[3] 3.Transformation and quality varies considerably in different network environments.
[4] 8-core High-performance CPU :Supports a variety of modes, including advanced mode, AI mode, 3D LiDAR mapping, etc.
[5] Voice functions include offline voice interaction, commands, intercom and music play.
[6] For more information, please read the secondary development manual.
[7] For more detailed warranty terms, please read the product warranty brochure.
[8] The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[9] If any change in the appearance of the product, please refer to the actual product.
[10] The 4G function of non-Chinese mainland version will only support 43 European countries (except Ukraine), and some Asian regions.
Tip:
-
Limited to the current technique and computing power resources, part of function shall be realized human operation or secondary development.
-
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
-
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.
List of accessories
 |
 |
 |
 |
| Manual controller | Standard Battery 8000mAh |
Long Endurance Battery 15000mAh |
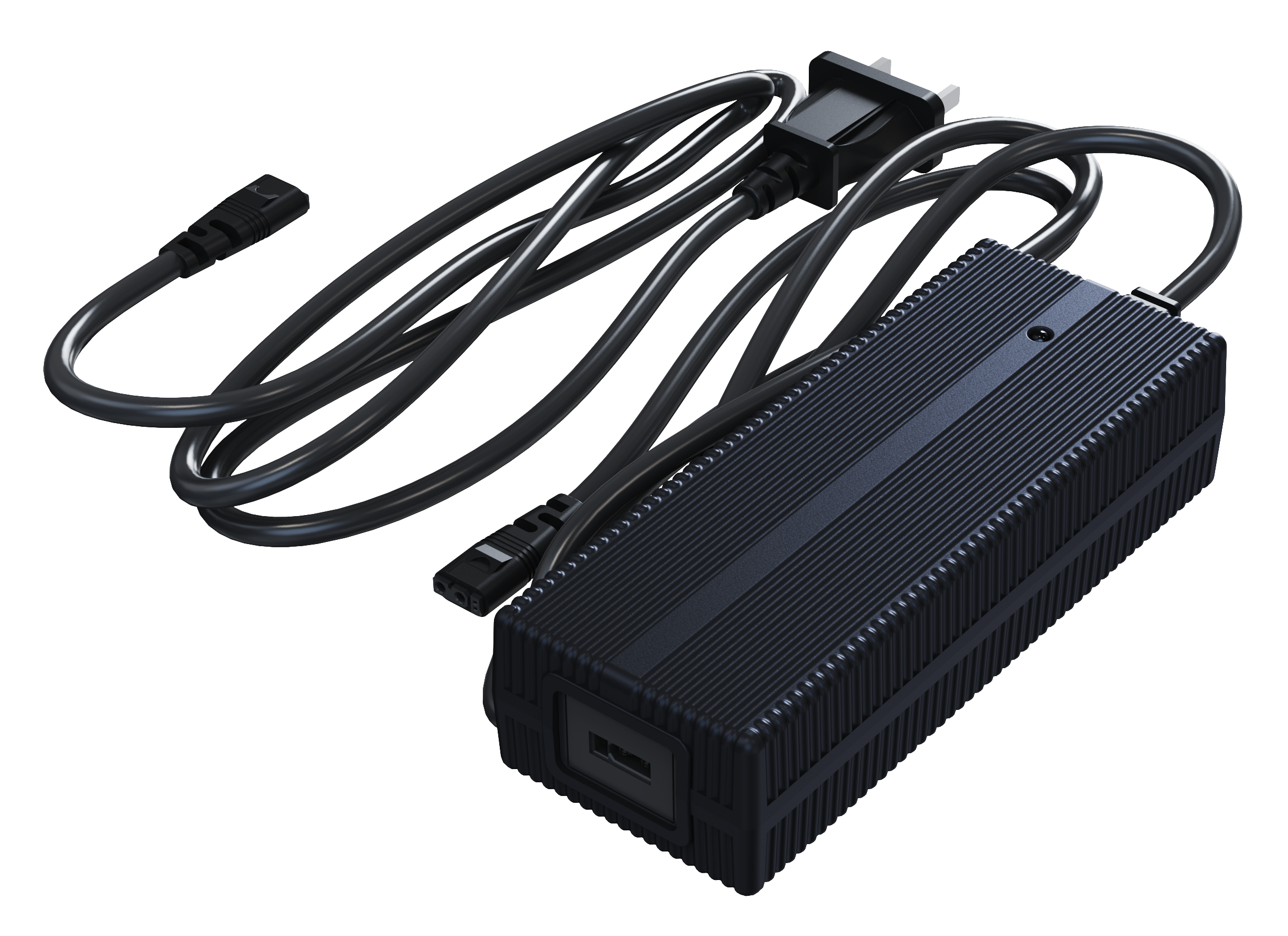
Charger (Standard 3.5A) |
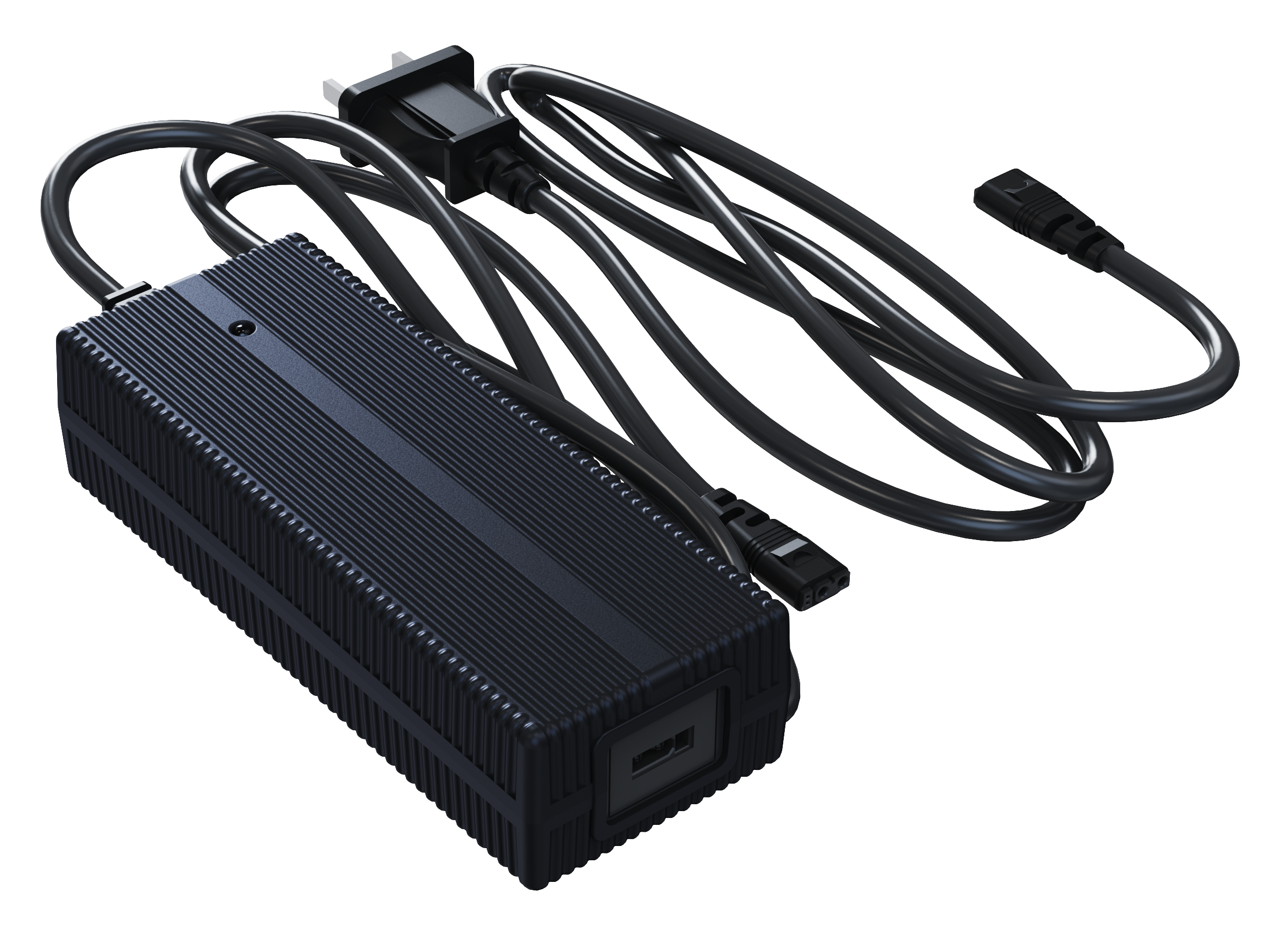 |
 |
 |
 |
| Fast Charger (Standard 9A) | Foot End | Charging Pile | Expansion Dock (Orin Nano 8GB) |
|
 |
 |
 |
| Expansion Dock (Orin NX 16GB) | Dual Cameras | The Small Servo Arm | Dual Cameras+Three in One |
 |
 |
 |
 |
| The Depth Camera D435i | The 3D Navigation Radar (MID-360) |
The 3D Navigation Radar (HESAI XTi6) |
Protective Bracket - Small |
Hardware Architecture
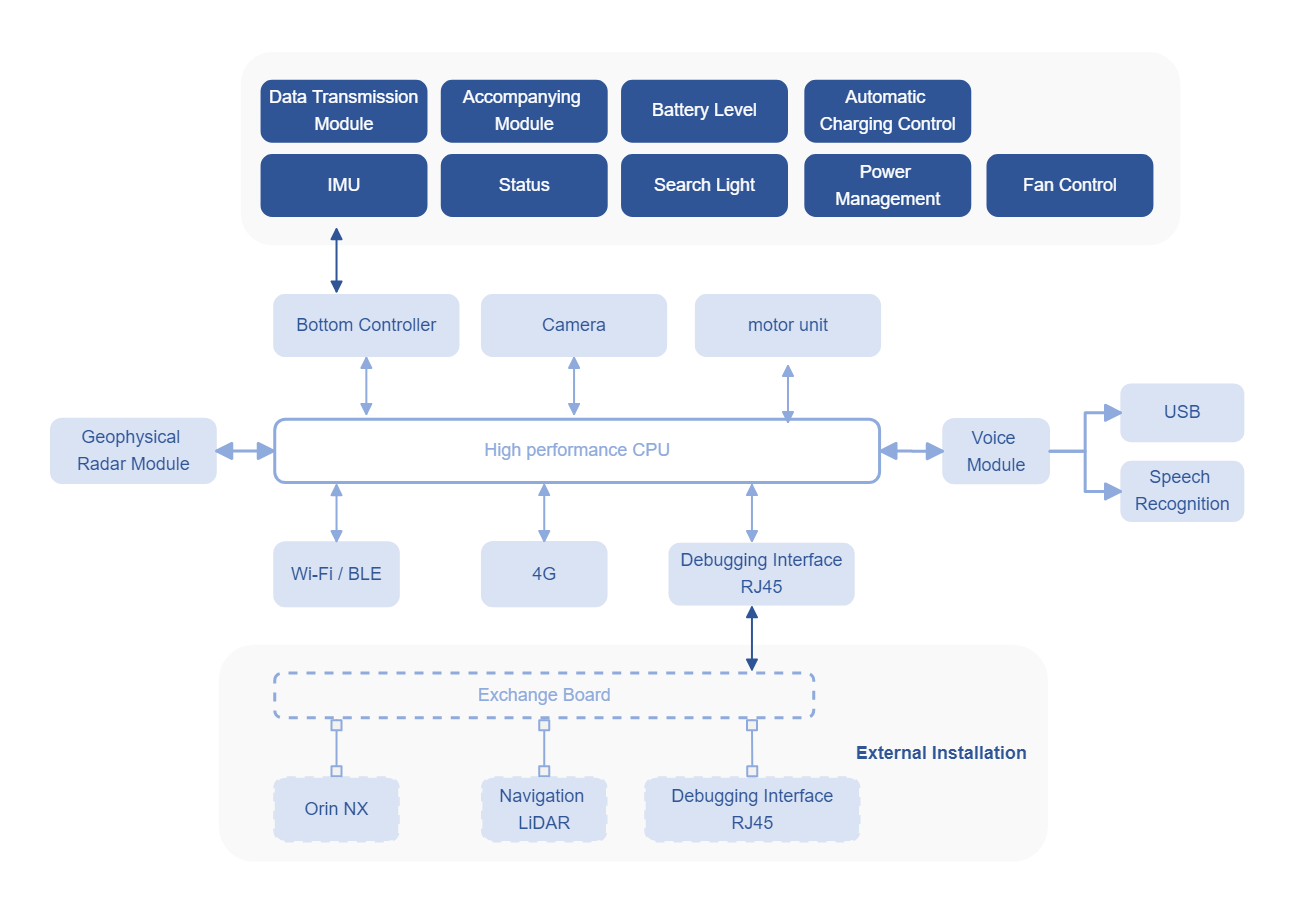
Hardware architecture
GO2 EDU
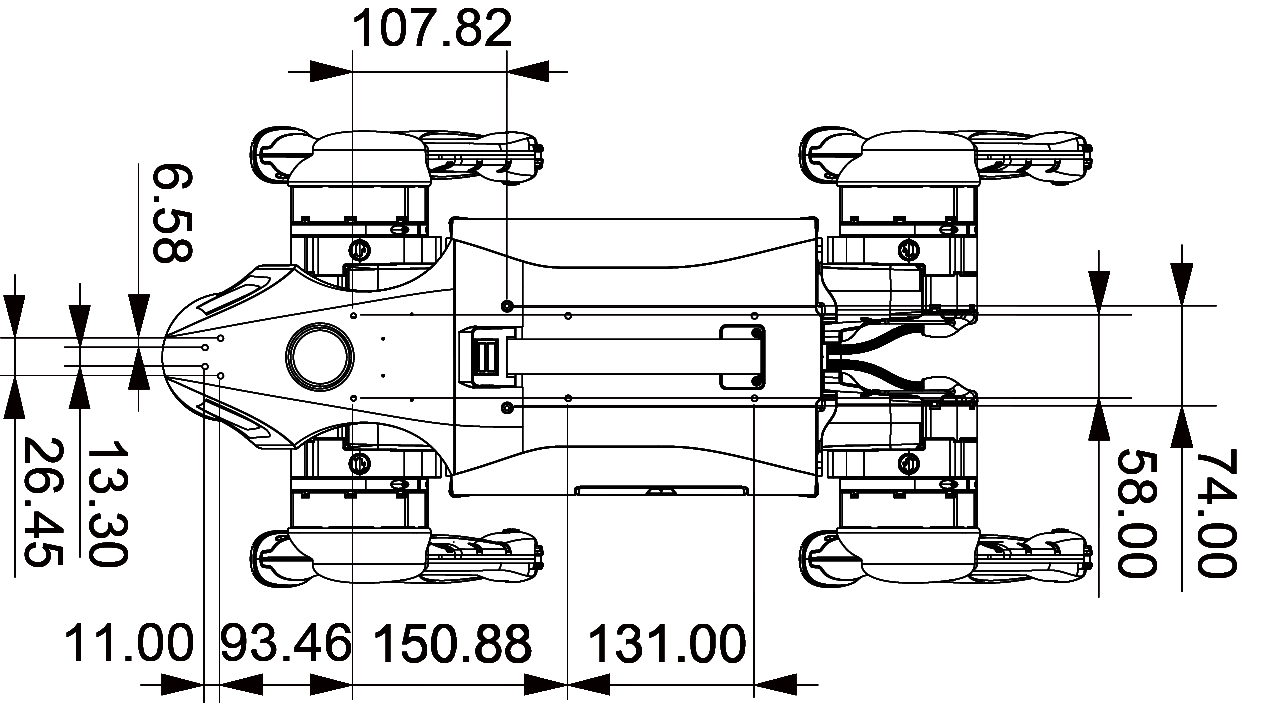
Back load installation hole map: unit: mm
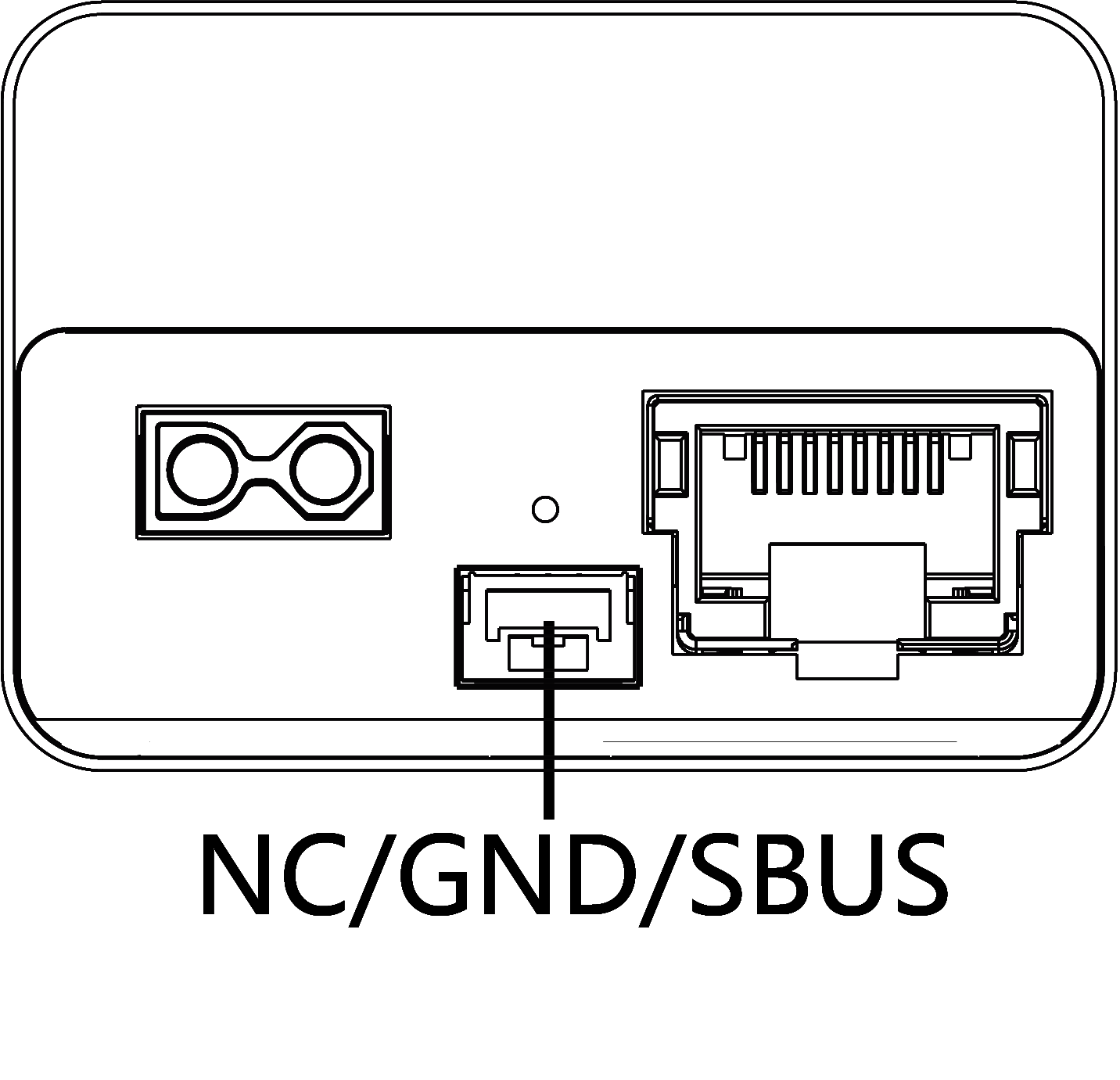
Electrical interface
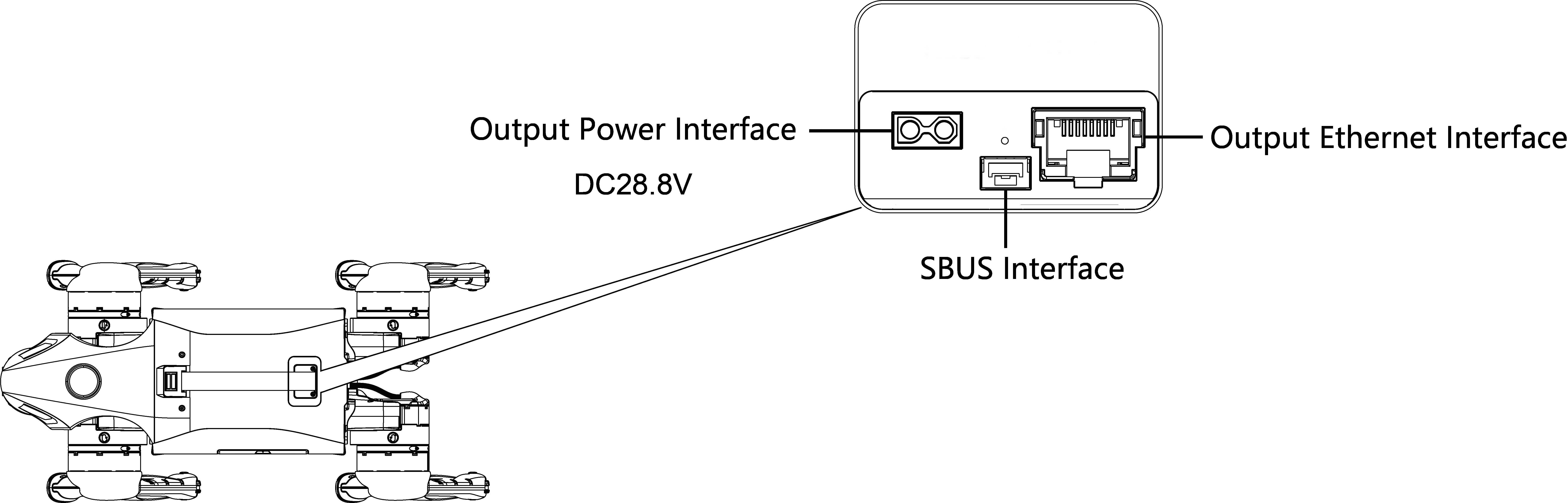
- Power interface
DC 28.8V output, connected to Orin NX 8/16GB high computing power module BAT input.
- Ethernet interface
Standard RJ45 interface, connected to User PC/Orin NX 8/16GB, RJ45 Ethernet interface.
- SBUS interface
Used for communication connection on a universal remote control. This interface does not provide power output, and the interface definition (from left to right) is NC/GND/SBUS.
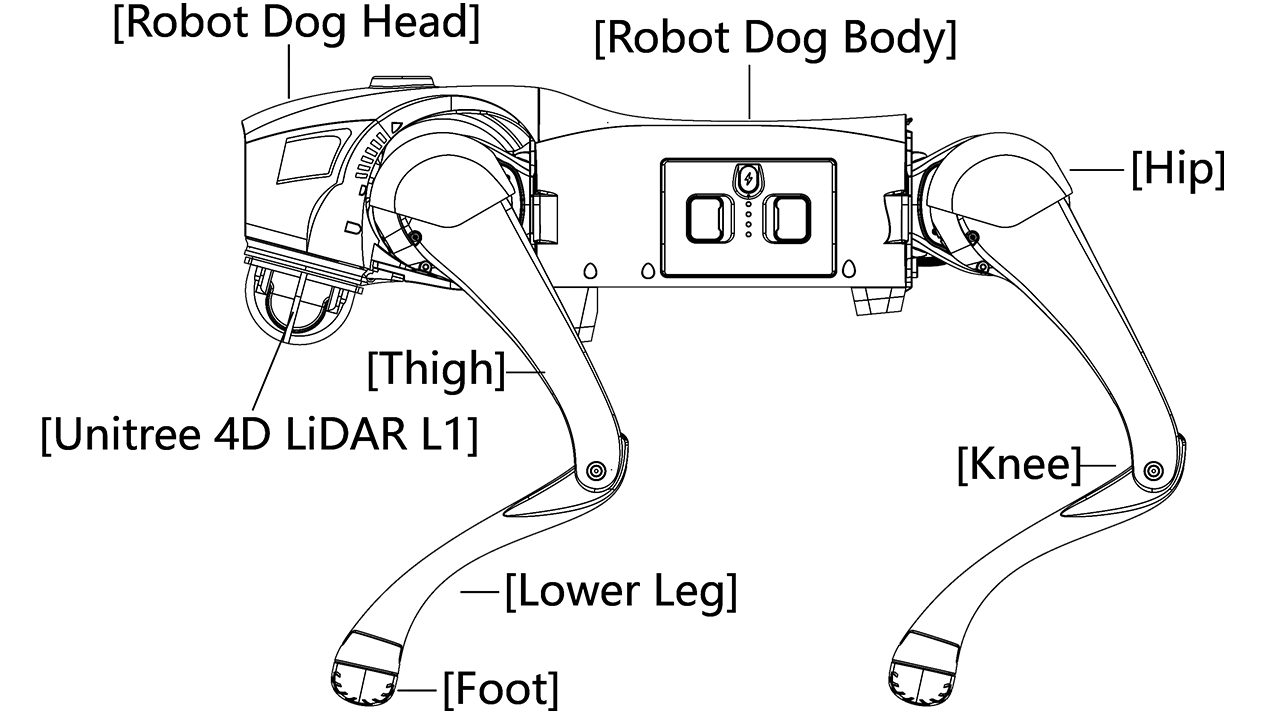
LIDAR
The head 4D LiDAR-L1 adopts Unitree Unitree's self-developed 4D radar technology (3D position+1D grayscale), which can achieve high-speed laser ranging sampling 21600 times per second, obtain real-time 3D information of the surrounding environment, and can be used for motion obstacle avoidance to cope with various complex road conditions!
| Unitree 4D LiDAR | |
|---|---|
| Model | L1 |
| Model | 75(W)x75(D)x65(H)mm |
| Supply Voltage | 12V DC |
| Laser wavelength | 905nm |
| FOV | 360°*90° |
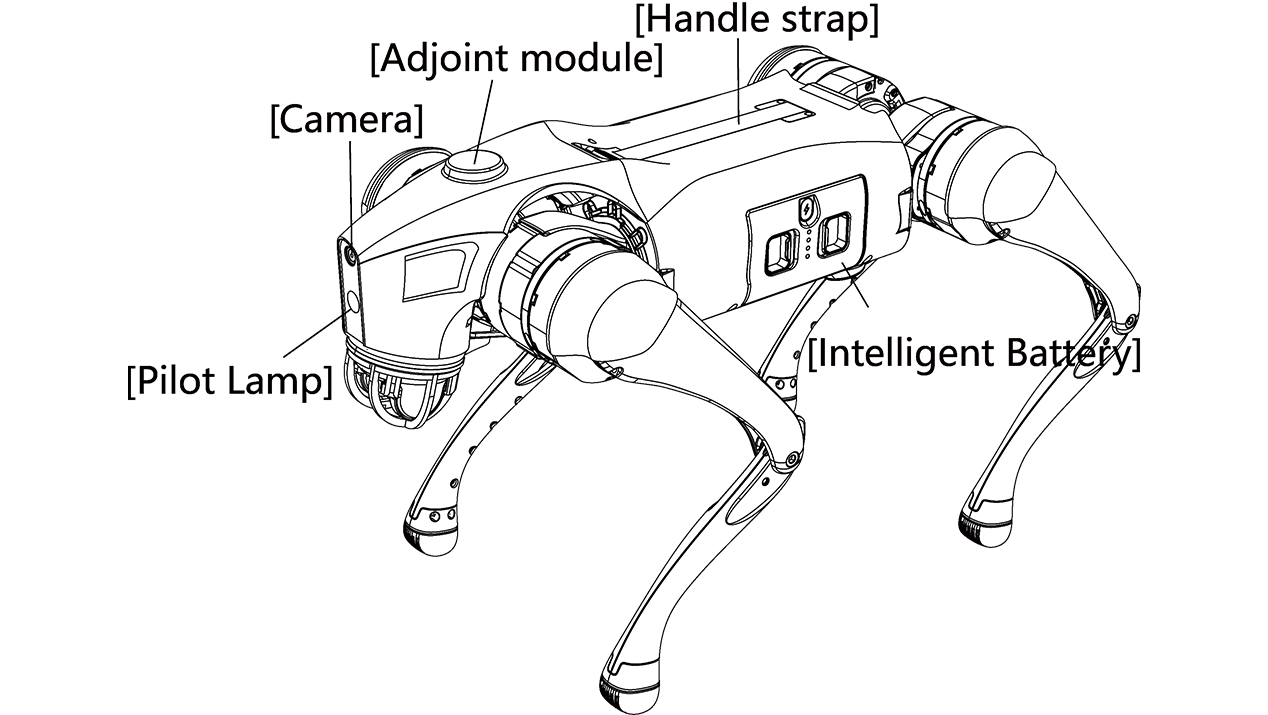
Pilot Lamp
| Color
|
Color and Flashing
|
Meaning
|
|---|---|---|
 |
Flash in green | Switching on |
 |
Permanently on in green | Powered on, default obstacle avoidance on |
 |
Permanently on in blue | Obstacle avoidance closure |
 |
Permanently on in yellow | Range mode |
 |
Permanently on in purple | Accompanying mode on state |
 |
Low flash rate in blue | Motor & IMU calibration in progress |
 |
Low flash rate in yellow | Low battery warning, will automatically crouch down within 10 minutes |
 |
Low flash rate in red | System abnormality, boot failure, hardware failure, need to contact after-sales service. |
 |
Fast flash rate in red | Motor & IMU calibration failed |
 |
Permanently on in white | Head indicator light |
note
Light priority: companion mode on (purple light always on)>endurance mode (yellow light always on)>obstacle avoidance off (blue light always on)
Camera
The head camera supports 720p, 15fps, 1080p, 15fps dual streams. The camera has 1080P (HD) 15fps or 720p 15fps high-definition shooting capabilities, a light aperture of F2.2, and a field of view of 120°. App high-definition image transmission is possible. In an undisturbed and unobstructed environment, the camera can ensure smooth 720p 15fps high-definition image transmission.
Joint serial number and joint limit
A quadruped robot is like an animal, with its body (Trunk) and limbs (Legs) symmetrical from side to side. It has four legs and is divided into two groups in front and back,
These two groups have the same coordinate system and joint range of motion, except for the differences before and after.
| Number of legs and joints: |
|---|
| Leg 0 :FR,right front leg |
| Leg 1 :FL,left front leg |
| Leg 2 :RR,right hind leg |
| Leg 3 :RL,left hind leg |
| Joint 0 :Hip, body joint |
| Joint 1 :Thigh,thigh joint |
| Joint 2 :Calf,calf joint |
| e.g.FR_thigth:Right front leg thigh joint |
| Each joint limit: |
|---|
| Each joint limit: -48°~48° |
| Thigh joint: Vertical direction is 0°, forward direction is positive, hind legs -260°~30°, forelegs -200°~90° |
| Lower leg joint: -156°~-48° |
Coordinate system, joint rotation axis and joint zero point
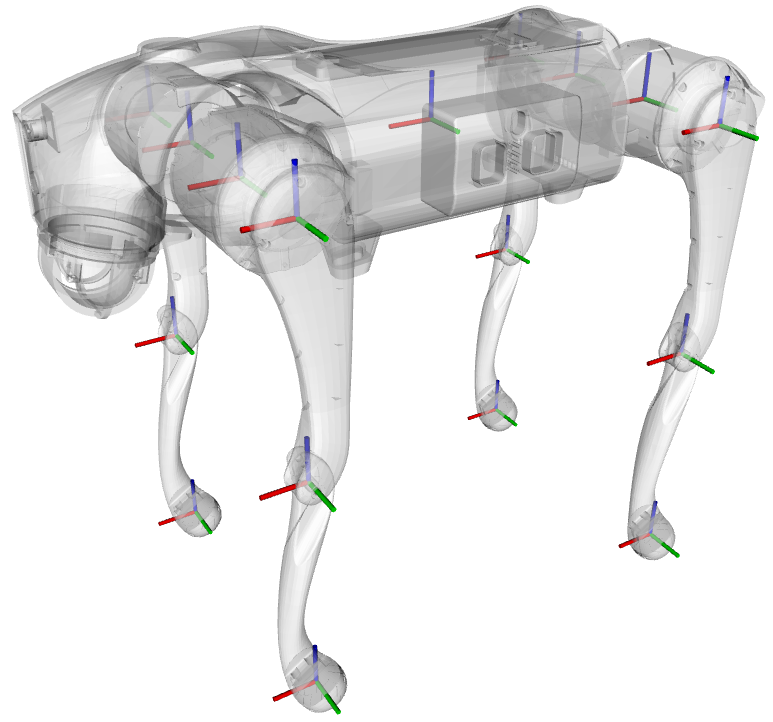
The rotation axis of the body joint is the x-axis, while the rotation axis of the thigh joint and calf joint is the y-axis. The positive direction of rotation conforms to the right-hand rule.
When all joints are at zero degrees, the coordinate systems are shown in the figure above. The red represents the x-axis, the green represents the y-axis, and the blue represents the z-axis. The calf joint cannot actually reach this position due to its limit position, and this is only to indicate the zero point position. It can be seen that the initial posture of each joint coordinate system is consistent, but the position and rotation axis are different.
Robot specifications
Dimensions
| Parameter | Specification |
|---|---|
| Naked machine length, width, and height (standing) | 70cm*31cm*40cm |
| Naked machine length, width, and height (lying down) | 76cm*31cm*20cm |
| Bare metal net weight (excluding battery) | About 15kg |
| Degrees of Freedom | 12 |
| Maximum speed | 3.7m/s (limit~5m/s) |
Environment
| Parameter | Specification |
|---|---|
| Operating temperature | 5 ℃ -35 ℃, operating in a good weather environment |
| Slope | +/- 40° |
| Maximum step height | 16cm |
| Lighting | 3W searchlight |
Battery related
| Specification parameters | ||
|---|---|---|
| Battery model | BT2-05 | BT2-06 |
| Battery weight | 2.5kg | 2.5kg |
| Battery capacity | 8000mAh,236.8Wh | 15000mAh,432Wh |
| Rated voltage | DC 29.6V | DC 28.8V |
| Charging limit voltage | DC 33.6V | DC 33.6V |
| Running time | 1-2h | 3-5h |
| Charging method | slow charging | fast charging/charging station |
| Charging current | 3.5A | 9A |
| Charging duration | 2h | 1h"15 |
Internal correlation
| Specification parameters | |
|---|---|
| Internal correlation | 8-core processor |
| 4G | built-in patch SIM card |
| Wi-Fi | WiFi 6 Dual Band Wireless 802.11x |
| Bluetooth | 5.2/4.2/2.1 |
| Storage Space | 64G |
| Output power supply | DC 28.8V (battery voltage) |
| Connection | RJ45 Ethernet port |
External Mount
Expansion dock
| Specification parameters | ||
|---|---|---|
| Mode | Orin Nano 8GB | Orin NX 16GB |
| Power supply voltage range | 16-60V DC | 16-60V DC |
| Computing power | Support up to 40Tops of computing power | Support up to 100Tops of computing power |
| Functional interface | USB 3.0 Type A X1, USB 3.0 Type C X1, USB 2.0 Type C X1, Gigabit Ethernet port (standard RJ45) X2, 100Mbps Ethernet (GH1.25-4PIN) X1, M8 aviation plug interface X1 | USB 3.0 Type A X1, USB 3.0 Type C X1, USB 2.0 Type C X1, Gigabit Ethernet port (standard RJ45) X2, 100Mbps Ethernet (GH1.25-4PIN) X1, M8 aviation plug interface X1 |
The 3D Navigation Radar
Go2 is compatible with two types of LiDARs, MID-360 and Hesai XT16 LiDARs, which can be used for Slam navigation.
| Specification parameters | ||
|---|---|---|
| Model | MID-360 | HESAI XTi6R |
| XT-16 LiDAR | 65mm*65mm*60mm | Φ100.0 / 103.0 mm*76mm |
| Power supply voltage range | 9-27V DC | 9-36V DC |
| Laser wavelength | 905nm | 905nm |
| FOV | Horizontal 360°, Vertical -7°~52° | Horizontal field of view angle 360°, Vertical field of view angle 30°(-15°~+15°) |
Depth camera
| Specification parameters | |
|---|---|
| Model | D435i |
| Size | 124mm*29mm*26mm |
| Minimum depth distance | 0.105 meters |
| Depth image resolution | 1280*720 @ 30fps;848*480 @ 90 fps |
| Deep field angle | 86° * 57° (±3°) |
The Small Servo Arm
| Model | D1 | D1-550 |
|---|---|---|
| Weight | Approximately 2.37kg | About 3.15kg |
| Degree of freedom | 6 degrees of freedom+1 claw clamp | 6 degrees of freedom+1 claw clamp |
| Load | 500g (ideal weight) | 500g (including clamp weight) |
| Maximum arm span | 550mm (excluding claw clamp) 670mm (including claw clamp) |
550mm (excluding jaws) 670mm (including jaws) |
| Motor type | Servo motor | Servo motor |
| Working radius | / | 550mm |
| Power demand | 24V 2.5A (MAX 5A) | 24V 10A(15~48V) |
| Power | 60W | 240W |
| Controller | / | Integrated (4 x Cortex-A55 1.8GHz) |
| Communication method | Control communication interface RJ45 (ETH) | RJ45 (Ethernet 100Mbps communication)+Type-C (serial port debugging) |
| Control method | DDS subscription | DDS subscription |
| Control cycle | / | 10Hz |
| Torque of each joint motor | / | J0: 3.3NM J1: 3.3NM J2: 1.7NM J3: 1.7NM J4: 1.7NM J5: 1.7NM J6: 1.7NM |
| Range of motion for each joint | J1: ±135° J2: ±90° J3: ±90° J4: ±135° J5: ±90° J6: ±135° |
J0: ±135° J1: ±90° J2: ±90° J3: ±135° J4: ±90° J5: ± 135 ° Claw stroke: 0-65mm |
Remote control with screen
| Specification parameters | |
|---|---|
| Remote control | |
| Camera display device | 5.5 inch 1080P high-definition and bright LCD touch screen display |
| System Configuration | Android 9.02GB running memory, 16GB storage space |
| Size (antenna retracted) | 189mm* 138mm*41 mm |
| Weigh) | 850 g |
| Battery capacity and type: | 10200 mAh 7.4V 2S ion battery |
| Fast charging protocol: | PD 20W |
| Charging time: | 5 hours (20W fast charging) |
| Assignment range: | 13 hours |
| Functional interface | Video output: Standard HDMI * Industry version only External device: USB-A Charging: Type-C Firmware upgrade: Upgrade port (bottom GH1.25 4Pin) File transfer: Type-C/USB-A Mobile network: SIM card slot External storage: TF card slot/USB-A Tripod fixed: 1/4 threaded hole |
| Camera perspective | FOV 120° |
| Dual cameras | |
| Product size | 106mm*25mm*41mm |
| Weight | 108g |
| Power consumption | 3W |
| Searchlight power率 | 8W |
| Luminous flux | 1W/120~140lm |
| Searchlight type | transparent |
Dual Cameras+Three in One
| Specification parameters | |
|---|---|
| Size | 270mm*143mm*133mm |
| Weight | 690g±10g |
| Power supply voltage range | 16-60V |
| Brightness | 3000lm |
| Light output angle | 15° |
| Power | Lighting: 30W; Speaker: 30W; Red and blue; 10W |
| Effective sound transmission distance | 500M |
| Maximum sound transmission distance | 800M |
| Maximum sound pressure | 130dB |
| Audio Format | mp3/wav/m4a/flac/aac |
| Control Method | App (Remote Control) |
| Function | Real time shouting, recording, uploading, audio playback, text conversion, voice lighting, flash lighting, constant lighting, brightness adjustment, red blue flash, red blue flash mode switching |